Motorregelingen
Voor industriële toepassingen worden servomotoren toegepast waar een aandrijving nauwkeurig of hoog dynamisch moet zijn. Servo is afgeleid van het Latijnse Sclavus “Slav”, wat eigenlijk “Volgen” betekent.
Een besturing geeft een commando. De motorversterker en de motor (actuator) volgen dit op. De uitvoering wordt veelal gecontroleerd via een terugkoppeling. Dit kan zijn via een pulsgever (Encoder of Hall-sensor), potentiometer, resolver of tacho achter op de motor. Hieronder een beknopt overzicht van de verschillende terugkoppelingen.
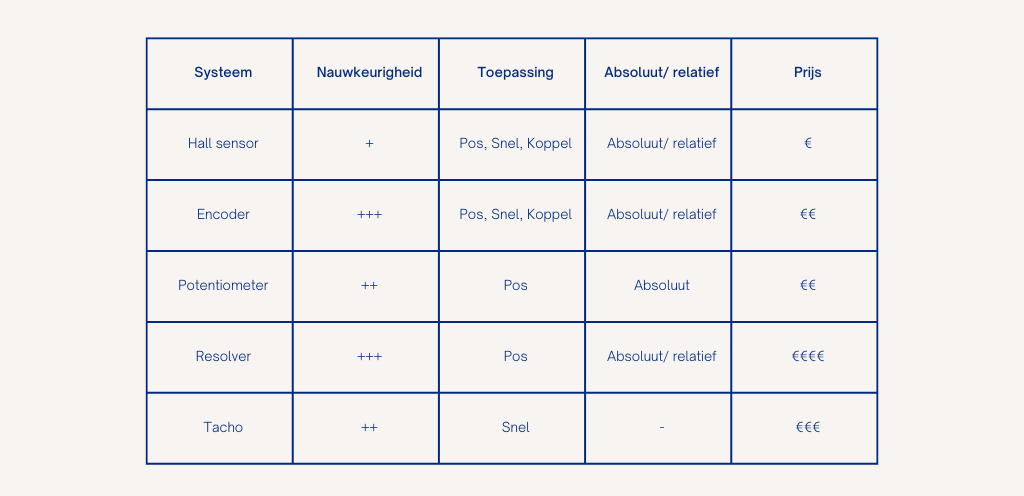
Nauwkeurigheid:
De hoeveelheid informatie die het systeem afgeeft aan de besturing. Vaak uitgedrukt in pulsen/omw. of pulsen/mm.
Toepassing:
Pos = Positioneren, toepassing waar men wil positioneren.
Snel = Snelheid, toepassing waar een snelheidsregeling van belang is.
Koppel = Kracht gestuurd systeem.
Absoluut/ Relatief:
Absoluut: Bij het opstarten is de exacte positie bekend. Positie is vergeleken met referentie.
Relatief: Bij het opstarten is exacte positie niet bekend. Positie is vergeleken met startpunt.
Prijs: Indicatie van het prijsniveau.
Voor alle type terugkoppelingen heeft Zilvertron een passende oplossing. Onderstaand wordt visueel uitgelegd hoe zo’n terugkoppeling werkt.
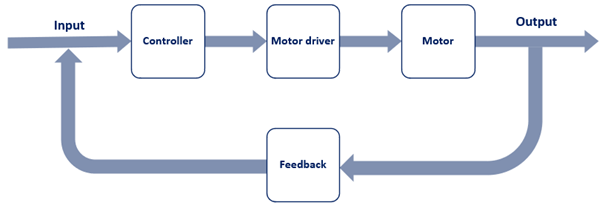
Controller:
Het ‘brein’ die het commando/input (positie of snelheid) ontvangt en controleert via het terugkoppel systeem (Feedback). Vaak zit hierin een PID-regeling of Fuzzy-regeling.
Motor driver:
De motor driver versterkt het signaal vanuit de controller ten behoeve van de motor.
Motor:
De motor zet de elektrische energie om in een mechanische beweging. De motor wordt ook wel actuator genoemd.
Feedback:
De terugkoppeling in de vorm van een hall sensor, encoder, potentiometer, resolver of tacho.
